캡스톤 디자인 경진대회
좌굴 발생 방향의 설정이 가능한 가변강성 소프트 조인트 설계
 경희대학교
경희대학교
SPA(Soft Pneumatic Actuator) 월드
#3단계 산학연협력 선도(전문)대학 육성 사업(LINC 3.0)
#일반대
우리 팀을 소개합니다.
경희대학교 기계공학과 4학년 학생으로 구성된 팀입니다.
캡스톤디자인 이렇게 시작되었어요.
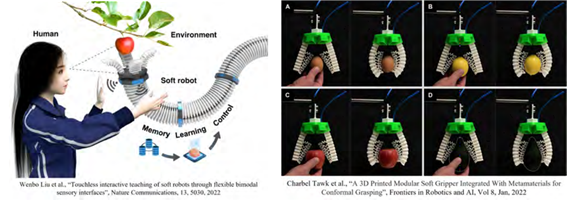
로봇-인간 협업의 안전성 증대를 위하여
과학 기술의 진보와 함께 로봇의 수요는 단지 산업 분야뿐 아니라 모든 분야에서 증가하고 있습니다. 그러나 고출력 모터를 사용하기 때문에 인간과의 협업 과제에 있어 안전성의 문제가 대두되기에, 이를 개선하고자 소프트 로봇을 개발하였습니다.
어떻게 문제를 해결할 수 있을까요?
기존 제품의 문제점 및 해결방안
현재 시장의 주를 이루는 로봇들은 대부분 알루미늄, 철, 플라스틱과 같이 단단한 소재를 사용하여 만들어졌고 고출력 모터를 사용하고 있어 안정성의 문제가 대두됩니다. 이에, 실리콘과 같이 부드럽고 유연한 소재를 활용하여 만들어진 로봇으로 재료적 특성을 이용하여 기존의 로봇은 만들어낼 수 없던 유연하고 연속적인 움직임을 만들어 내어 높은 적응성을 이용하여 형상을 정의하기 어려운 물체를 잡거나 복잡한 환경에서의 구동이 가능하며, 특히 인간과의 협업에 있어 높은 안전성을 제공할 수 있습니다.
결과물의 특·장점 및 과제 수행 내용
첫째, 재료적 특성에 의한 인간-로봇 협동 작업에서의 높은 안전성을 갖습니다.
둘째, 좌굴의 발생 방향을 설정함에 따라 특정 방향에 대한 가변강성이 가능합니다.
이러한 강점을 이용하여 본 소프트 조인트를 여러 개 사용하여 변형되기 쉬운(외력에 민감한 물체) 물체를 집거나 옮길 수 있는 소프트 그리퍼로서 사용할 수 있습니다. 또한, 본 소프트 조인트를 직렬로 연결하여 각 모듈 별 가변 강성이 가능한 소프트 매니플레이터로서도 활용 가능합니다.
저희는 이렇게 문제를 해결했어요.
활용방안 / 수익성 분석
본 과제에서는 좌굴의 발생 방향을 설정할 수 있으며 이에 따라 특정 방향에 따라 강성이 달라지는 가변강성 soft joint를 설계하였습니다.
음압을 활용해 구조물에 좌굴을 유도시키고 이를 통해 가변강성을 달성하는 메커니즘을 설계하였으며 두 가지의 테스트를 통해 이를 검
증 하였고, 제시한 soft joint는 사용자가 필요에 따라 강성을 조절하여 더 넓은 workspace 혹은 더 높은 payload를 제공할 수 있다는 데에 의의가 있습니다. 더 나아가 제시한 soft joint를 하나의 모듈로써 여러 개를 결합하면 소프트 매니플레이터로써 사용이 가능하며, 이 매니플레이터는 기존 매니플레이터에 비해 더 안전하고 새로운 작업환경에 대한 적응성이 높다는 특징이 있습니다.
기대효과
소프트 매니플레이터는 기존 매니플레이터가 접근하기 어려운 위치도 도달할 수 있는 능력을 가졌으며, 안전성을 이유로 메디컬 분야에서도 그 수요가 증가하고 있습니다. 이에 더해 본 소프트 조인트를 활용하여 제작하고자 하는 소프트 매니플레이터는 가변강성의 방향을 바꿀 수 있기에 그 쓰임새가 많을 것으로 기대됩니다.







