기존 제품의 문제점 및 해결방안
테니스 공을 수거하는 기술에 대해서는 선행 사례가 있으나, 구체적으로 인공지능 기술을 활용하여 효율적으로 테니스 공을 수거하는 기술에 대해서는 기재되어 있지 않는 실정입니다. 땨라서, 현재 위치 정보를 인식하고 복수 개의 테니스 공의 위치를 인식하여 GPS 정보 및 인공지능 알고리즘을 이용한 테니스 공 수거의 최적의 경로를 생성한 뒤 순차적으로 테니스 공을 수거할 수 있도록 설계했습니다.
결과물의 특·장점 및 과제 수행 내용
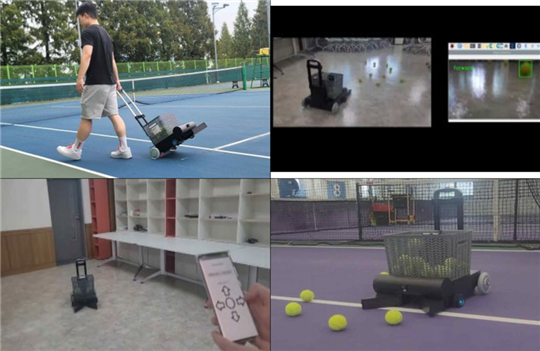
라즈베리파이와 같은 소형 컴퓨터에서도 무리 없이 실행 가능한 lite 버전을 사용하여 약 2,000 장의 테니스 공 이미지의 학습을 통해 정확한 인식을 가능하게 했습니다. 또한, 테니스 공을 효율적으로 수집하기 위하여 인식한 객체의 픽셀 크기를 바탕으로 로봇과의 거리를 대략 파악하여 여러 개의 테니스 공 중 가장 가까이 위치한 테니스 공을 우선적으로 수집하도록 알고리즘을 개발 및 적용하였습니다.
 동국대학교
동국대학교







